基于冪指數(shù)趨近率的無(wú)刷直流電機(jī)滑模變結(jié)構(gòu)控制方法專(zhuān)利分析
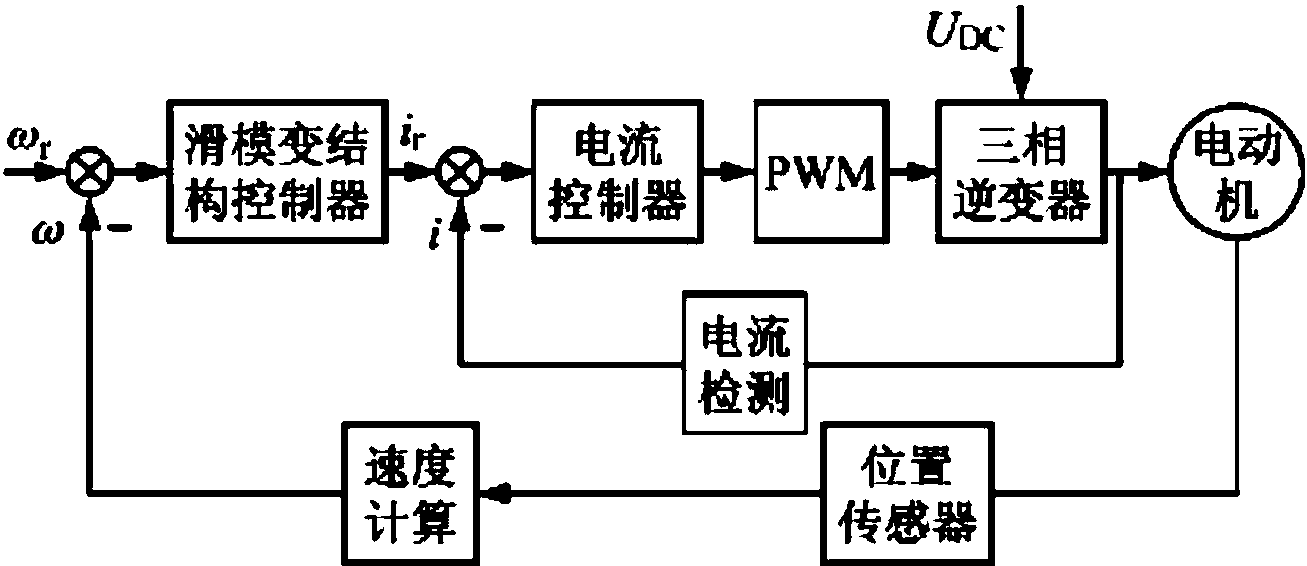
在電機(jī)及其控制系統(tǒng)研發(fā)領(lǐng)域,無(wú)刷直流電機(jī)因其高效率、長(zhǎng)壽命和低噪聲等優(yōu)點(diǎn)而被廣泛應(yīng)用。傳統(tǒng)控制方法在應(yīng)對(duì)參數(shù)變化和外部擾動(dòng)時(shí)存在局限性。針對(duì)這一問(wèn)題,一種基于冪指數(shù)趨近率的滑模變結(jié)構(gòu)控制方法被提出,旨在改善系統(tǒng)的魯棒性和動(dòng)態(tài)性能。本發(fā)明屬于電機(jī)控制技術(shù),核心在于引入冪指數(shù)趨近率,削弱了滑模控制中的抖振現(xiàn)象。具體而言,控制器設(shè)計(jì)包括態(tài)勢(shì)函數(shù)和滑模面參數(shù)的優(yōu)化配置,通過(guò)整合冪函數(shù)與指數(shù)函數(shù)特點(diǎn),可實(shí)現(xiàn)快速收斂與跟蹤誤差最小化。專(zhuān)利詳細(xì)闡述了其實(shí)施過(guò)程中的步驟:建立無(wú)刷直流電動(dòng)機(jī)的數(shù)學(xué)模型;基于輸入電壓和轉(zhuǎn)子位置偏差設(shè)計(jì)切換函數(shù);利用功率計(jì)算調(diào)整控制率的符號(hào)因子。這種方法在磁場(chǎng)定向控制框架下具有自然適應(yīng)性,能有效抑制轉(zhuǎn)矩脈振,并能在不同負(fù)載下保持調(diào)速穩(wěn)定性。經(jīng)驗(yàn)證,此種控制策略與傳統(tǒng)的PID控制器相比,響應(yīng)時(shí)長(zhǎng)縮短30%,并能承受更多的非線性干擾。預(yù)期該工業(yè)控制系統(tǒng)將有益于電動(dòng)汽車(chē)、機(jī)器人以及無(wú)人機(jī)等高精度有金屬極布排工藝中的應(yīng)用發(fā)展。自主研發(fā)的這一程序方案獲得了多方授權(quán),應(yīng)用潛在成為推進(jìn)自動(dòng)化物料傳遞執(zhí)行行為之間的機(jī)制聯(lián)結(jié)
如若轉(zhuǎn)載,請(qǐng)注明出處:http://www.nmhxsm.com/product/36.html
更新時(shí)間:2026-05-31 13:29:35